





Mon second Wraith
4 participants
 ZygmonRevoiste Padawaaa qui veut Jediwééé
ZygmonRevoiste Padawaaa qui veut Jediwééé

Nombre de messages : 491
Age : 45
Localisation : Seine et Marne
Date d'inscription : 23/06/2012
 Mon second Wraith
Mon second Wraith
Mer 11 Sep 2013 - 21:10
Petit post du second Wraith avec du retard.
Comme le fiston adore le Wraith et que lorsque l'on sortait ensemble je ne pouvais pas le conduire, j'ai revendu mon summit (très bonne machine mais un peu lourde et surtout trop large pour passer partout). Je me suis donc repris un wraith histoire qu'on soit à armes égales.

Dans la bête:
-Tekin RS Gen2.
-Redline Gen2 17.5 RPM sensored.
4WS :
-Savöx 1283SG à l'avant et à l'arrière.
- CCBEC 10A
-C-Hub et porte fusées VP pour l'avant et stock à l'arrière.
-Cardan universels axial à l'avant et à l'arrière.
-Direction type suicide faite maison à l'avant et à l'arrière.
-Un DIG axial avec un servo Traxxas.
-Kit led axial.
-Cardan MIP
-Amortisseurs stock
Roues:
-Beadlock 2.2 axial + Ripsaw.
-Peinture Tamiya violet/vert irisé + mon margouillat vert (je n'ai pas eu le courage de le refaire sur ce Wraith mais je regrette).
Le tout piloté par une GT3C hacké avec un récepteur 6 voix.
Premier bricolage pour placer proprement le vario sans le coincer dans le bac à accu à l'arrière du Wraith.
On se creuse la tête pour économiser la matière première et avoir un maximum de chose utiles et fonctionnelles.
Ça donne un zoli patron.

La benne arrière fera office de... benne (c'était pas évident ), de passage de roue (ok il y a des jours dedans mais je ne veux pas que le Wraith prenne trop de poids) et de renfort des points de fixation des amortisseurs.
), de passage de roue (ok il y a des jours dedans mais je ne veux pas que le Wraith prenne trop de poids) et de renfort des points de fixation des amortisseurs.
Place aux photos:
Après avoir joué de la Dremel et un peu d’origami.

Placé à blanc avant retailles et perçage des trous de fixation.


Tout est en place et vissé. Plus rien ne dépasse (sauf les 2 piliers de support d'amortisseur qui vont être coupé je fabriquerai une rehausse dans de l'alu plus épais).

Demain soir si j'ai le temps et le courage on continue la préparation du châssis en fabriquant la platine avant pour l'accu et le boîtier étanche du récepteur.
Voila, le châssis est enfin prêt, j'ai découpé et placé la platine avant qui accueillera le boîtier du récepteur et la batterie.

Comme j'ai reçu mon CCBEC aujourd'hui j'ai plastidipé tout l'éléctronique (vario, servo, récepteur, BEC). Après quelques tests de roulage je m'attaquerai au moteur histoire de ne pas cramer le capteur si je roule dans trop d'eau.
Le Brushless avec ses 3 câbles et le DIG passe au chausse pied mais ça passe
Le seul truc que je vais devoir surveiller c'est la chauffe car les câbles sont plaqués sur la cage du moteur. Après avec des gaines silicones j'ai de quoi voir venir mais bon vu le prix du joujou je ne voudrais pas l'abîmer bêtement.

Voilà le second Wraith est enfin monté (depuis mercredi).
Comme je voulais faire un truc super propre je me suis lancé dans le découpage et le soudage des rallonges de l'ESC, du servo arrière et du DIG...
Quelle mauvaise idée!
Le fait de raccourcir mes rallonges a créé des interférences du coup le moteur faisait comme s'il avait du coging alors que j'étais plein gaz, le servo arrière avait des soubresauts enfin
du coup le moteur faisait comme s'il avait du coging alors que j'étais plein gaz, le servo arrière avait des soubresauts enfin  . J'ai donc utilisé des rallonges complètes.
. J'ai donc utilisé des rallonges complètes.
Trouver le pourquoi du comment m'a pris un peu de temps mais tout fonctionne impeccablement.
Samedi premier jour des vacances j'avais donc trouvé l'explication à tous mes soucis et je me lance dans les premiers roulages sur mon tas de cailloux et dans l'herbe franchement tondue.
Le 80/20 du kit donne une pêche hallucinante au Wraith et une vitesse de pointe de 25km/h. Seul bémol c'est du grand n'importe quoi lorsque l'ESC est réglé pour la balade et le crawl, le Wraith part en tonneaux au premier virage fait des wheelies... Et pour couronner le tout le moteur chauffe (il reste pourtant possible de crawler avec cette config vu la souplesse du combo RS Gen2 17.5T RPM).
Donc on essaye en 87/18 pour passer à 20km/h max. C'est bien plus raisonnable mais le soucis c'est que ça chauffe encore lorsque l'on crawl dans les cailloux.
J’abats donc ma dernière carte en mettant un pignon de 16 (18km/h max). Et là c'est le top le Wraith est très pêchu (un coup de gâchette et il saute la bosse qui est juste devant lui) il roule 5km/h de plus que le Gun Metal Wraith a la même souplesse à bas régime et le moteur ne chauffe plus du tout.

Ce matin petite balade d'1h45 en utilisant 25% de la lipo 5800mah contre 23% pour l'autre Wraith piloté par le fiston.
Je vais donc pouvoir attaquer le bricolage secondaire (pneux, jantes, amortisseurs et treuil) ainsi que la fabrication d'accessoires pour rendre tous ça plus réaliste.
Bon comme tout est ok sur le wraith je m'attaque au côté humide de nos balades.
Je ne souhaite pas ouvrir un débat sur le fait qu'utiliser des lipo ou un moteur brushless et pire une version à capteur en milieu humide comporte des risques et que certains s'y refusent d'autres le font sans rien protéger etc.
Pour ma part j'aime bien rouler dans les flaques d'eau ou ne pas être bloqué par un cours d'eau se trouvant sur mon chemin. Mon premier Wraith en version brushed avec un 35T est parfaitement adapté à cette utilisation.
Seul bémol c'est principalement le fiston qui le roule. Je prévois d'acheter un autre moteur brushed pour passer l'hiver tranquille dans les cours d'eau mais pour cet été, je préfère protéger au max mon combo brushless sensored.
Toute personne voulant faire la même chose que moi doit peser le pour et le contre et adapter ce que je fais à son moteur.
Étape 1 démontage pour voir ce qui craint l'eau.
Un moteur brushless c'est... un moteur brushed monté à l'envers
Au lieu de mettre les aimants sur le stator pour un brushed ils sont sur le rotor pour le brushless et le bobinage se retrouve sur la stator en brushless au lieu d'être sur le rotor en brushed.
Il n'y a pas de composant électronique, les bobines sont recouvertes d'epoxy donc ça ne craint pas plus l'eau qu'un brushed.
Sur le capot arrière du moteur on trouve le capteur et là... on a de l'éléctronique. Toutefois il n'y a rien de bien sorcier et surtout aucun contact avec une pièce mobile. C'est donc cette partie qu'il va falloir protéger de l'eau.
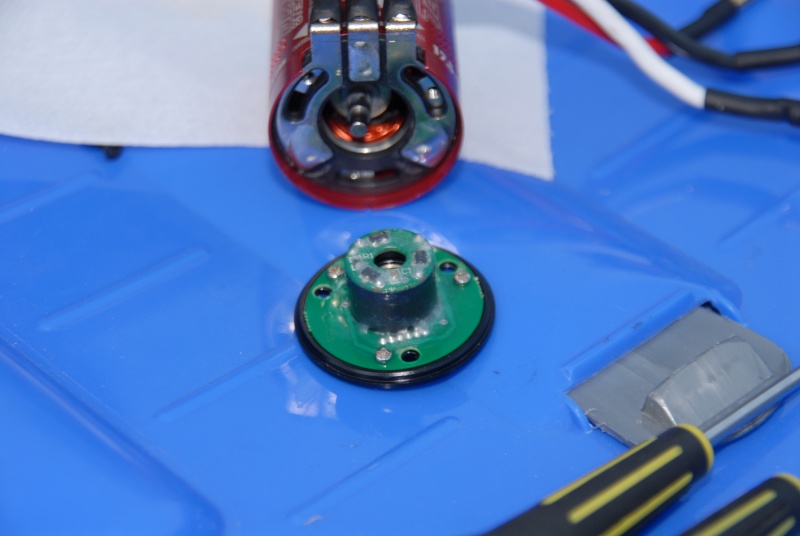
Étape 2 plastidipage du capteur.
La il faut s'adapter à son capteur. Celui du Redline Gen2 est particulièrement bien ajusté au reste du moteur.
Il faut donc tout démonter et protéger l'intérieur du capteur et la partie qui est plaquée contre le capot arrière, puis replacer le capteur sur le capot arrière.
Ensuite il faut protéger le grand disque du PCB et replacer une rondelle cartonnée qui est la pour éviter les court jus.
Pour finir on protège la partie la plus sensible (celle qui comporte les petits composants qui mesurent la position du rotor).
Il faut laisser sécher le plastidip 30min, 1h entre chaque étape pour faire un travail propre.
Lorsque c'est fini on remonte et on test voir si le capteur joue encore son rôle (ouf tout fonctionne comme si je n'avais rien fait)
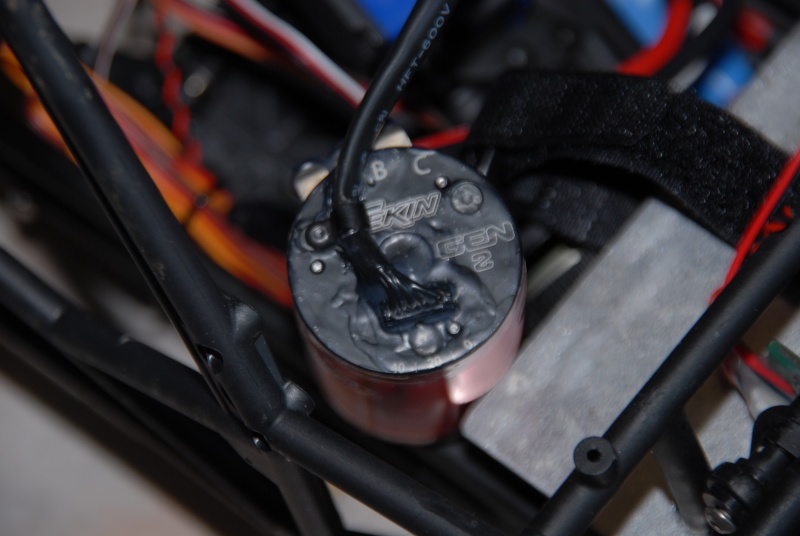
Bon vu les modifications esthétiques que Tekin a apporté à la version Gen2 de ses moteurs, je suis loin d'avoir un corps de moteur quasi étanche. Il y a 6 trous pour visser le moteur à la platine, un énorme jour derrière les 3 câbles d'alimentation, 3 grosses ouvertures sur l'avant et 2 petites grilles (dont aucun air ne sort lorsque le moteur tourne) sur les flans...
Aux grands trous, les grands moyens.
Je prends de la mousse de joint pour réservoir de chasse d'eau et je découpe différents petits bouchons adaptés à chaque trous.

Je plastidipe le tout et je laisse sécher.
La suite demain lorsque j'aurai découpé une rondelle pour le roulement avant, un bouchon pour le roulement arrière et plastidipé tout une dernière fois.
Point important brancher la prise du capteur et plastidiper la, c'est la seule partie qui craigne réellement l'eau avec le capteur.
Le reste de mon bricolage est là surtout pour éviter que des cochonneries rentrent dans le moteur. Quand je vois la poussière qu'il y avait dedans après une seule balade d'une heure quarante-cinq dans les cailloux et de la terre humide.
Une fois terminé ça donne ça:
A l'avant, il ne reste que les 2 trous pour visser le moteur à son support.

A l'arrière, plus aucun trou et le câble du capteur est scellé au plastidip.
Il ne me reste plus qu'à faire une balade avec le moteur ainsi protégé et voir s'il ne chauffe pas.
Voilà, j'ai fini la peinture hier, collé deux trois autocollants discrets.
Demain matin je vais le faire rouler je pourrais voir si le moteur chauffe avec sa protection mode sauvage.


La peinture de base est un violet/vert irisé qui ne rend pas super sur les photos.
Pour le retour de roulage de cette config et d'autres blabla et photo c'est ici.
Comme le fiston adore le Wraith et que lorsque l'on sortait ensemble je ne pouvais pas le conduire, j'ai revendu mon summit (très bonne machine mais un peu lourde et surtout trop large pour passer partout). Je me suis donc repris un wraith histoire qu'on soit à armes égales.
Dans la bête:
-Tekin RS Gen2.
-Redline Gen2 17.5 RPM sensored.
4WS :
-Savöx 1283SG à l'avant et à l'arrière.
- CCBEC 10A
-C-Hub et porte fusées VP pour l'avant et stock à l'arrière.
-Cardan universels axial à l'avant et à l'arrière.
-Direction type suicide faite maison à l'avant et à l'arrière.
-Un DIG axial avec un servo Traxxas.
-Kit led axial.
-Cardan MIP
-Amortisseurs stock
Roues:
-Beadlock 2.2 axial + Ripsaw.
-Peinture Tamiya violet/vert irisé + mon margouillat vert (je n'ai pas eu le courage de le refaire sur ce Wraith mais je regrette).
Le tout piloté par une GT3C hacké avec un récepteur 6 voix.
Premier bricolage pour placer proprement le vario sans le coincer dans le bac à accu à l'arrière du Wraith.
On se creuse la tête pour économiser la matière première et avoir un maximum de chose utiles et fonctionnelles.
Ça donne un zoli patron.
La benne arrière fera office de... benne (c'était pas évident
), de passage de roue (ok il y a des jours dedans mais je ne veux pas que le Wraith prenne trop de poids) et de renfort des points de fixation des amortisseurs.Place aux photos:
Après avoir joué de la Dremel et un peu d’origami.
Placé à blanc avant retailles et perçage des trous de fixation.
Tout est en place et vissé. Plus rien ne dépasse (sauf les 2 piliers de support d'amortisseur qui vont être coupé je fabriquerai une rehausse dans de l'alu plus épais).
Demain soir si j'ai le temps et le courage on continue la préparation du châssis en fabriquant la platine avant pour l'accu et le boîtier étanche du récepteur.
Voila, le châssis est enfin prêt, j'ai découpé et placé la platine avant qui accueillera le boîtier du récepteur et la batterie.
Comme j'ai reçu mon CCBEC aujourd'hui j'ai plastidipé tout l'éléctronique (vario, servo, récepteur, BEC). Après quelques tests de roulage je m'attaquerai au moteur histoire de ne pas cramer le capteur si je roule dans trop d'eau.
Le Brushless avec ses 3 câbles et le DIG passe au chausse pied mais ça passe
Le seul truc que je vais devoir surveiller c'est la chauffe car les câbles sont plaqués sur la cage du moteur. Après avec des gaines silicones j'ai de quoi voir venir mais bon vu le prix du joujou je ne voudrais pas l'abîmer bêtement.
Voilà le second Wraith est enfin monté (depuis mercredi).
Comme je voulais faire un truc super propre je me suis lancé dans le découpage et le soudage des rallonges de l'ESC, du servo arrière et du DIG...
Quelle mauvaise idée!
Le fait de raccourcir mes rallonges a créé des interférences
. J'ai donc utilisé des rallonges complètes.Trouver le pourquoi du comment m'a pris un peu de temps mais tout fonctionne impeccablement.
Samedi premier jour des vacances j'avais donc trouvé l'explication à tous mes soucis et je me lance dans les premiers roulages sur mon tas de cailloux et dans l'herbe franchement tondue.
Le 80/20 du kit donne une pêche hallucinante au Wraith et une vitesse de pointe de 25km/h. Seul bémol c'est du grand n'importe quoi lorsque l'ESC est réglé pour la balade et le crawl, le Wraith part en tonneaux au premier virage fait des wheelies... Et pour couronner le tout le moteur chauffe (il reste pourtant possible de crawler avec cette config vu la souplesse du combo RS Gen2 17.5T RPM).
Donc on essaye en 87/18 pour passer à 20km/h max. C'est bien plus raisonnable mais le soucis c'est que ça chauffe encore lorsque l'on crawl dans les cailloux.
J’abats donc ma dernière carte en mettant un pignon de 16 (18km/h max). Et là c'est le top le Wraith est très pêchu (un coup de gâchette et il saute la bosse qui est juste devant lui) il roule 5km/h de plus que le Gun Metal Wraith a la même souplesse à bas régime et le moteur ne chauffe plus du tout.
Ce matin petite balade d'1h45 en utilisant 25% de la lipo 5800mah contre 23% pour l'autre Wraith piloté par le fiston.
Je vais donc pouvoir attaquer le bricolage secondaire (pneux, jantes, amortisseurs et treuil) ainsi que la fabrication d'accessoires pour rendre tous ça plus réaliste.
Bon comme tout est ok sur le wraith je m'attaque au côté humide de nos balades.
Je ne souhaite pas ouvrir un débat sur le fait qu'utiliser des lipo ou un moteur brushless et pire une version à capteur en milieu humide comporte des risques et que certains s'y refusent d'autres le font sans rien protéger etc.
Pour ma part j'aime bien rouler dans les flaques d'eau ou ne pas être bloqué par un cours d'eau se trouvant sur mon chemin. Mon premier Wraith en version brushed avec un 35T est parfaitement adapté à cette utilisation.
Seul bémol c'est principalement le fiston qui le roule. Je prévois d'acheter un autre moteur brushed pour passer l'hiver tranquille dans les cours d'eau mais pour cet été, je préfère protéger au max mon combo brushless sensored.
Toute personne voulant faire la même chose que moi doit peser le pour et le contre et adapter ce que je fais à son moteur.
Étape 1 démontage pour voir ce qui craint l'eau.
Un moteur brushless c'est... un moteur brushed monté à l'envers
Au lieu de mettre les aimants sur le stator pour un brushed ils sont sur le rotor pour le brushless et le bobinage se retrouve sur la stator en brushless au lieu d'être sur le rotor en brushed.
Il n'y a pas de composant électronique, les bobines sont recouvertes d'epoxy donc ça ne craint pas plus l'eau qu'un brushed.
Sur le capot arrière du moteur on trouve le capteur et là... on a de l'éléctronique. Toutefois il n'y a rien de bien sorcier et surtout aucun contact avec une pièce mobile. C'est donc cette partie qu'il va falloir protéger de l'eau.
Étape 2 plastidipage du capteur.
La il faut s'adapter à son capteur. Celui du Redline Gen2 est particulièrement bien ajusté au reste du moteur.
Il faut donc tout démonter et protéger l'intérieur du capteur et la partie qui est plaquée contre le capot arrière, puis replacer le capteur sur le capot arrière.
Ensuite il faut protéger le grand disque du PCB et replacer une rondelle cartonnée qui est la pour éviter les court jus.
Pour finir on protège la partie la plus sensible (celle qui comporte les petits composants qui mesurent la position du rotor).
Il faut laisser sécher le plastidip 30min, 1h entre chaque étape pour faire un travail propre.
Lorsque c'est fini on remonte et on test voir si le capteur joue encore son rôle (ouf tout fonctionne comme si je n'avais rien fait)
Bon vu les modifications esthétiques que Tekin a apporté à la version Gen2 de ses moteurs, je suis loin d'avoir un corps de moteur quasi étanche. Il y a 6 trous pour visser le moteur à la platine, un énorme jour derrière les 3 câbles d'alimentation, 3 grosses ouvertures sur l'avant et 2 petites grilles (dont aucun air ne sort lorsque le moteur tourne) sur les flans...
Aux grands trous, les grands moyens.
Je prends de la mousse de joint pour réservoir de chasse d'eau et je découpe différents petits bouchons adaptés à chaque trous.
Je plastidipe le tout et je laisse sécher.
La suite demain lorsque j'aurai découpé une rondelle pour le roulement avant, un bouchon pour le roulement arrière et plastidipé tout une dernière fois.
Point important brancher la prise du capteur et plastidiper la, c'est la seule partie qui craigne réellement l'eau avec le capteur.
Le reste de mon bricolage est là surtout pour éviter que des cochonneries rentrent dans le moteur. Quand je vois la poussière qu'il y avait dedans après une seule balade d'une heure quarante-cinq dans les cailloux et de la terre humide.
Une fois terminé ça donne ça:
A l'avant, il ne reste que les 2 trous pour visser le moteur à son support.
A l'arrière, plus aucun trou et le câble du capteur est scellé au plastidip.
Il ne me reste plus qu'à faire une balade avec le moteur ainsi protégé et voir s'il ne chauffe pas.
Voilà, j'ai fini la peinture hier, collé deux trois autocollants discrets.
Demain matin je vais le faire rouler je pourrais voir si le moteur chauffe avec sa protection mode sauvage.
La peinture de base est un violet/vert irisé qui ne rend pas super sur les photos.
Pour le retour de roulage de cette config et d'autres blabla et photo c'est ici.
- ZygmonRevoiste Padawaaa qui veut Jediwééé
Nombre de messages : 491
Age : 45
Localisation : Seine et Marne
Date d'inscription : 23/06/2012
Re: Mon second Wraith
Jeu 3 Oct 2013 - 20:52
Quelques nouvelles après celle de mes vacances.
Le combo Tekin RS2 17.5T RPM est passé dans le premier wraith et j'ai mis le même combo mais en 21.5T RPM dans celui-ci.
Ce que ça donne ?
Une tuerie pour un wraith.
C'est sûre, ce n'est pas un merv ni un EREVO mais avec ce combo on a strictement plus rien à envier au summit (qui reste cependant un super véhicule).
Le combo Tekin RS2 17.5T RPM est passé dans le premier wraith et j'ai mis le même combo mais en 21.5T RPM dans celui-ci.
Ce que ça donne ?
Une tuerie pour un wraith.
C'est sûre, ce n'est pas un merv ni un EREVO mais avec ce combo on a strictement plus rien à envier au summit (qui reste cependant un super véhicule).
 Greg56100Revoiste Padawaaa qui veut Jediwééé
Greg56100Revoiste Padawaaa qui veut Jediwééé
Nombre de messages : 463
Age : 43
Localisation : Lorient Bretagne
Date d'inscription : 24/03/2013
Re: Mon second Wraith
Mar 5 Nov 2013 - 20:46
Bravo ! Ca donne des idées et des envies !! 
 EncoreUneMod!Revoiste Maître Jediwaaa
EncoreUneMod!Revoiste Maître Jediwaaa
- Nombre de messages : 1093
Localisation : Montreal
Date d'inscription : 08/12/2009
Re: Mon second Wraith
Mer 6 Nov 2013 - 4:27
Yea, good job mec!
 Aureli1Modo SpotMan Revoiste Jediwaaa
Aureli1Modo SpotMan Revoiste Jediwaaa
Nombre de messages : 5701
Age : 45
Localisation : Paris.
Date d'inscription : 13/02/2008
Re: Mon second Wraith
Mer 4 Déc 2013 - 16:22
Salut Zygmon, j'ai copié la partie de ton message qui explique comment waterproofer un moteur sensored ici pour que ce soit mieux répertorié:
Waterproofer ses composants
Merci à toi.
Waterproofer ses composants
Merci à toi.
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum



